深海探险,你需要这样一个遥控机器人
发布时间:2019-05-21|【 】
深海水下机器人是当前深海探测与作业的主要手段。1997年5月21日至6月27日,由中国科学院沈阳自动化研究所联合声学所等单位研制的6000米无缆自治水下机器人(auv)cr-01,圆满完成了太平洋海底的各项调查任务,开启了我国深海水下机器人研发及应用的新篇章。
在传统的几类水下机器人中,与auv名头相当的还有遥控水下机器人(rov)和载人潜水器(hov),其中rov以其高效、长时、强作业能力等特点而备受关注,在石油平台、海洋工程等领域作业发挥重大作用,今天就为大家介绍一下rov。
你听说过rov吗?
遥控水下机器人,英文全称 remotely operated vehicle,简称rov,又称无人遥控水下机器人。所谓无人遥控,就是指机器人本体自己下潜到深海去工作,操控人员在母船上进行远程遥控。
怎么遥控呢?原来rov有根“脐带”一样的脐带缆与母船相连接,母船上的rov控制台通过脐带缆向rov本体传输动力、控制信号等,水下视频、图像以及传感器采集到的数据也是通过脐带缆传回控制台的。
rov分这么多种
——根据机器人个头大小和作业能力,rov可分为观测型和作业型。观测型rov主要用于海底资源探测、电缆检查等,通常较小,多用于执行浅水任务。作业型rov主要用于海底沉物打捞、资源开发、深海科考等,既有观测型rov的功能,如配备了光源、摄像机、声呐、传感器等设备,又有作业功能,如安装了多功能机械手。
——根据机器人运动方式,rov可分为浮游和履带爬行两种,当前用于深海采矿和掩埋电缆的大都采用履带爬行方式
——根据作业深度,rov可分为浅海级、深海级和深渊级。绝大多数观测型rov属于浅海级rov,多数作业型rov属于深海级rov,目前世界上只有少数几个国家拥有深渊级rov。
——根据rov配置方式的不同,rov系统可分为有中继器与无中继器两种模式。带中继器的rov在小范围精确作业操纵性好,但是中继器与水下机器人本体水下分离和对接时具有一定难度。
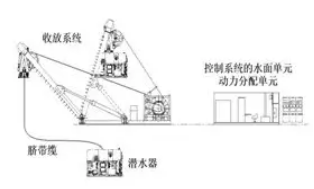

无中继器rov系统(典型代表:中科院沈阳自动化研究所研制的海星6000 rov)
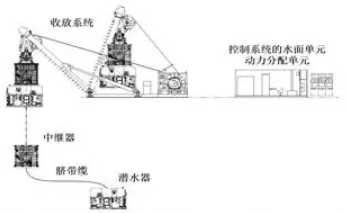

有中继器rov系统(典型代表:中科院沈阳自动化研究所研制的海星1000 rov)
rov有什么本领?
说了这么多,rov到底有什么用呢?可不要小看它,rov应用范围非常广泛,在深海作业领域有着不可替代的作用,主要包括:
· 科考:包括水下、冰下环境、生物的观测与研究;水下考古观察和文物打捞;近海底岩石、泥样采集和钻探取样;深海测量、海底剖面测绘、海洋水文研究;深海矿藏勘探等。
· 搜救:搜寻、定位和回收打捞失事飞机、舰船的残骸等。
· 安装:包括海底管道及电缆的开沟埋设,水下输油管道的连接、检测,海底安装物的维护和修理。
· 维修:海洋钻探和建造支持,视频观察、监测安装、操作支持到维修。
· 检测:跟踪水下管线以检测漏点,确定管线的安全状态;监测石油平台的腐蚀和堵塞情况,定位破损、查找裂缝和评估海洋生物污染;码头、桩基、桥梁、大坝水下部分检修和破损评估,航道排障与港口作业。
· 环境:在管线、电缆和设备安装之前,对环境进行视频和声学扫查。
· 清除:石油平台、船底、水库坝面和拦污栅的清刷,清理等。
沈阳自动化所的rov研制历程
沈阳自动化所已经研制rov几十年啦,这是我们的rov家族:
|
年份 |
名字 |
备注 |
图片 |
|
1984年 |
海人一号 “hr-1” |
我国首套rov,我国首套水下机器人 |
|
|
1987年 |
瑞康iv “recon-iv” |
我国首套rov产品并出口 |
|
|
1987年 |
海蟹号 “sea crab” |
第一套爬行rov |
|
|
1992年 |
海人号 “hr-sia” |
观察型 |
|
|
1994年 |
海人100 “hr-100” |
观察型 |
|
|
1995年 |
援潜系列 “yq2” |
打捞作业 |
|
|
2000年 |
海星300m rov |
打捞作业 |
|
|
2003年 |
海极号 “sea pole” |
我国首套极地科考rov |
|
|
2003年 |
海星埋缆rov “cistar” |
我国首套埋缆rov |
|
|
2006年 |
海星1000mrov |
我国首套1000米作业型rov定型产品 |
|
|
2016年 |
海星6000rov |
我国首套6000米科考rov |
|
“海星6000” rov——突破6000米深度!

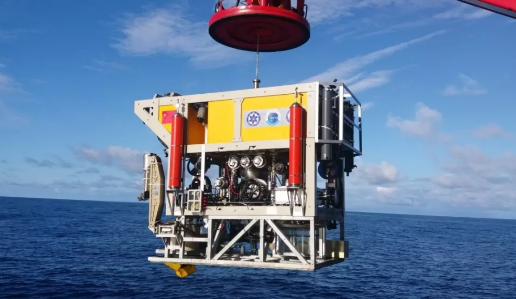
“海星6000”rov海试照片
“海星6000”上装备了先进的照明摄像单元,主要用于监视rov水下作业、拍摄海底生物以及环境的高清视频,并为rov运动、采样作业等提供照明支持。它配备了2台高清摄像机、2台标清摄像机以及4台低光摄像机。
高清摄像机分为科学高清和驾驶高清,科学高清摄像机主要用于拍摄深海生物及环境的高清视频,为科学家研究提供高质量视频资料;驾驶高清摄像机主要为操作员提供海底高清视频信息,使操作员驾驶rov过程中获得更好的视觉体验,同时便于rov操作员进行海底的精细操作。
2台标清摄像机布置于水下机器人前框架,用于俯拍监视采样托架内及机械手作业情况,4台低光摄像机分别用于观察脐带缆水下状态、采样托架内工具状态、辅助观察机械手及采水瓶工作状态。“海星6000”共配备7台水下灯,其中3台为科学家高清摄像机提供照明支持。
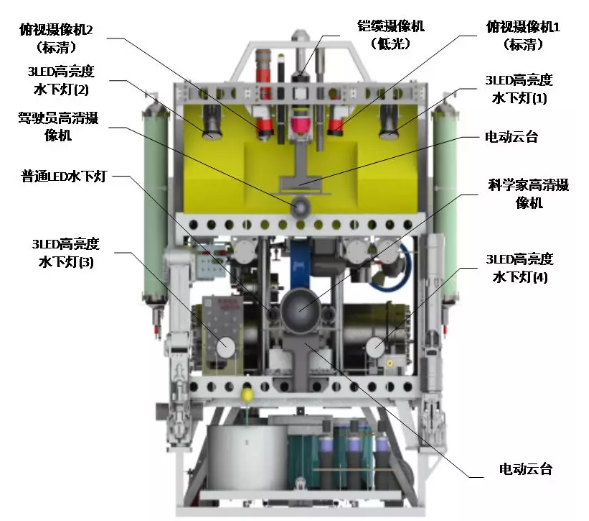
“海星6000”rov本体照明摄像单元总体布局
“海星6000”上装备了一套沈阳自动化所自主研制的7000米7功能深海主从伺服液压机械手及多型个性化科考作业工具。这款机械手也是很厉害的,自研机械手在水下设备移位和生物、沉积物、岩石取样中发挥重大作用,已有2套安装在“深海勇士”hov上,目前沈阳自动化所研制的全海深液压机械手已完成海试,其工作深度可达11000米。
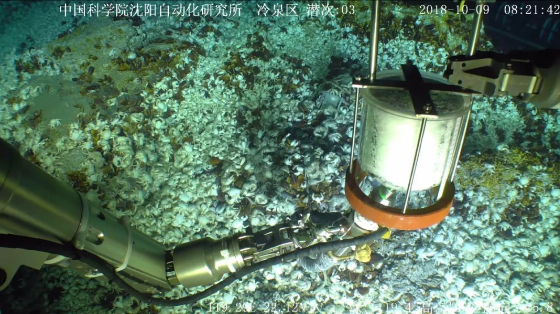
继2017年9月6000米深海试验成功后,“海星6000”rov于2018年10月重返6000米海域挑战我国rov最大下潜深度。它与同在海洋先导专项支持下研制的“冷泉”号着陆器和拉曼光谱仪等协同完成了冷泉区科考工作。“海星6000”完成了对着陆器的搜寻、精准移位与协同观测、天然气水合物的原位收集与拉曼光谱仪原位探测、冷泉区水样原位过滤固定及宏生物、沉积物与水样的采集等。
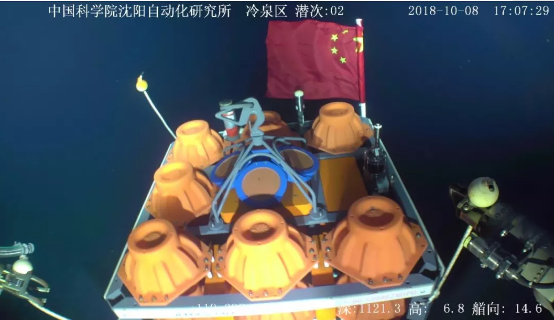
“海星6000”海底移位着陆器
“海星6000”利用拉曼光谱仪原位探测
在加瓜海脊海域开展的2000米级科考应用潜次中,“海星6000”一天内完成了三个不同底质位点的岩石、水样采集工作,下潜深度分别为1700米、2100米和2200米,获取岩石样品分别为190kg、106kg和80kg,最大单体岩石重量61kg。连续大强度的科考作业,进一步验证了它的稳定性和可靠性。
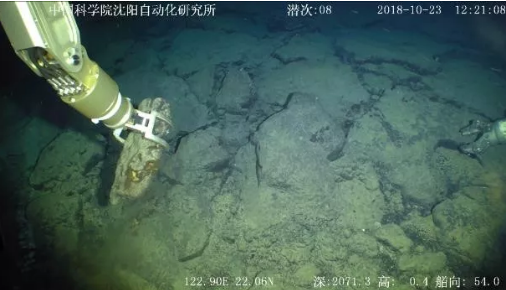
“海星6000”利用自研机械手采集海底岩石
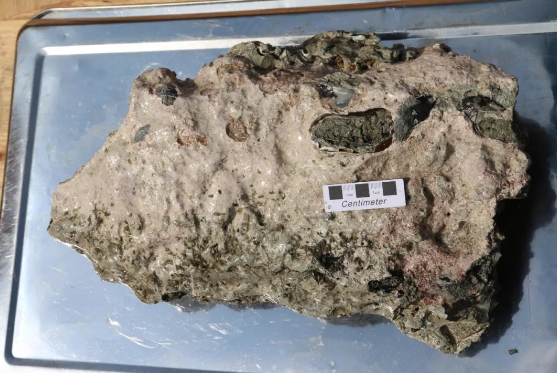
2100米海底获取的岩石样品
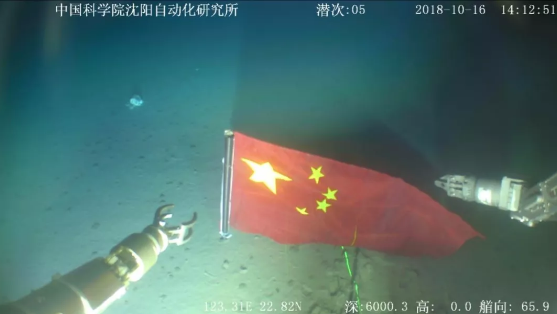
在6000米级潜次中,“海星6000”在海底连续工作3小时,完成了6000米近海底大范围航行观察、生物调查、海底特征表层沉积聚成物获取、泥样和水样采集、模拟黑匣子搜索打捞、标识物放置及深海浮力调节功能试验等,最大工作深度6001米,创造我国rov最大潜深的纪录!
“海星6000”在6000米海底插国旗

6000米海底拍摄到的生物
整个航次期间,“海星6000”顺利完成了1000米、2000米、4000米、6000米多个深度等级共计9个潜次的综合科考任务,开展了深海生物、沉积物、水样、岩石等系列化取样、深海模拟打捞及激光拉曼的原位测量、深海生物、地质等观测,全面验证“海星6000”综合科考能力。
在众多水下作业装备中,rov以其高效、长时、强作业能力等特点而备受关注,在石油平台、海洋工程和深海科考等领域作业发挥重大作用,近年来我国在深海rov研制开发和应用方面高速发展,国产rov的推广应用任重而道远,科研人员将不懈努力!
“海星6000”rov是沈阳自动化所最新研制的rov产品。它是一种无中继模式的rov。rov本体通过脐带缆直接与母船相连接,脐带缆起着物理连接、能源供给与信息传输等作用;“海星6000”全系统主要由rov载体系统、控制系统、动力与辅助系统、水面收放系统深海升降运载平台等组成。
附件下载: